






|
產(chǎn)品描述:
移動機(jī)器人比賽是一種高科技對抗活動,各國專家學(xué)者通過移動機(jī)器人競賽,不斷推進(jìn)了在競賽型移動機(jī)器人方面的研究,不斷改進(jìn)機(jī)器人尋址速度和算法研究,試圖讓機(jī)器人更接近智能化,它集高科技、娛樂和比賽于一體,引起了各國的廣泛關(guān)注和極大興趣,從而推動了移動機(jī)器人研究的熱潮。
而智能車以其結(jié)構(gòu)簡單、形式新穎、適合對象面廣、擴(kuò)展性強(qiáng)等特點在高校教學(xué)、實踐、競賽中備受推崇。鑒于絕大分的智能車載體都是選用直流電機(jī)結(jié)構(gòu)。這次我們推出一款”步進(jìn)電機(jī)智能車“底盤。希望能對移動機(jī)器人教學(xué)、實踐工作提供一些幫助。
1. . 步進(jìn)電機(jī)智能車的優(yōu)勢:
(1) 步進(jìn)電機(jī)停轉(zhuǎn)的時候具有最大的轉(zhuǎn)矩(當(dāng)繞組激磁時);(2)沒有電刷,電機(jī)壽命長;(3) 有較好的位置精度和運(yùn)動的重復(fù)性;(4) 電機(jī)的響應(yīng)僅由數(shù)字輸入脈沖確定,可開環(huán)控制;
而使用普通直流電機(jī)的智能車,定位和轉(zhuǎn)速測量過程中存在自動化水平低、操作復(fù)雜、精度難以保證(要實現(xiàn)精確控制目的,則需要通過編碼器等器件來實現(xiàn),而且定位精度和編碼器精度直接相關(guān))。
當(dāng)然直流電機(jī)也有自己的特點:應(yīng)用簡單——通電就轉(zhuǎn)、價格較低——普通的玩具電機(jī)不到1元一只、體積較小——可以安裝到很小的空間里面。所以深得電子愛好者的喜歡。
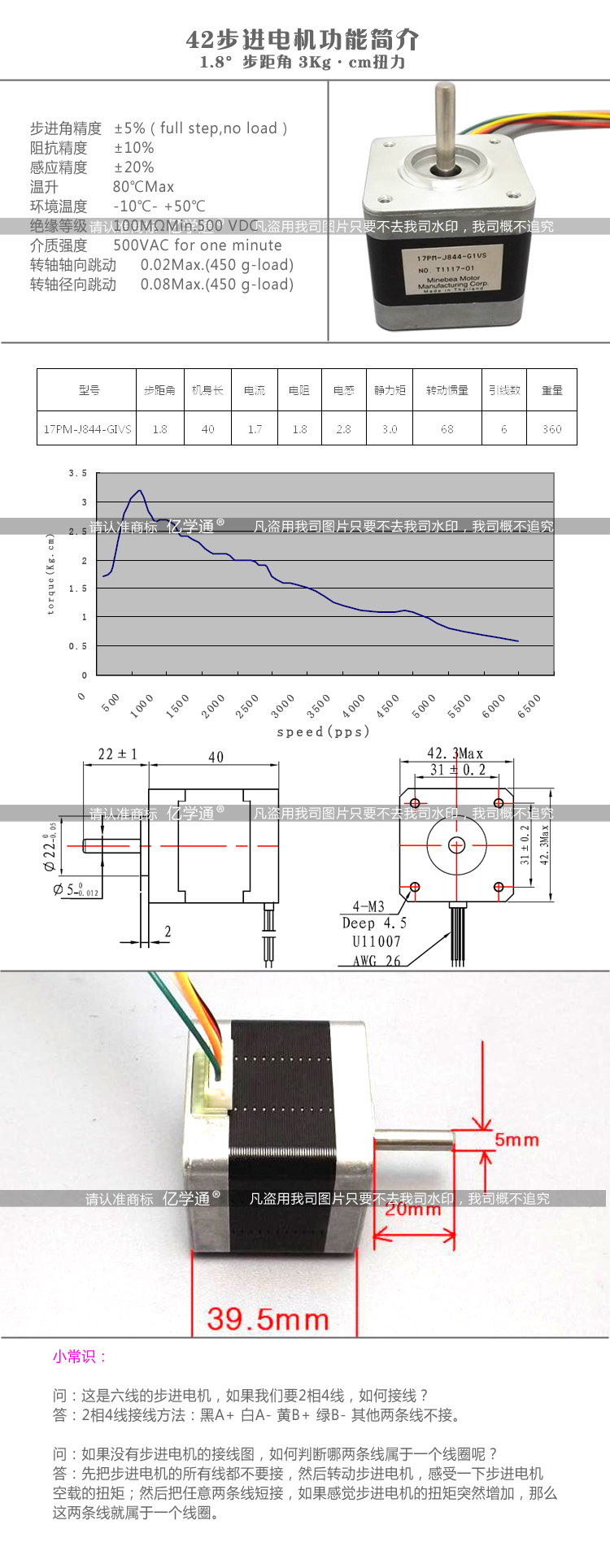
2. 步進(jìn)電機(jī)的選擇:
步進(jìn)電機(jī)有步距角(涉及到相數(shù))、靜轉(zhuǎn)矩、及電流三大要素組成(和直流電機(jī)不一樣的是,沒有額定電壓的參數(shù))。一旦三大要素確定,步進(jìn)電機(jī)的型號便確定下來了。
不是所有的步進(jìn)電機(jī)都可以制作智能車,需要根據(jù)智能車的用途來選擇。一般制作競賽類的機(jī)器人,如迷宮機(jī)器人、巡線機(jī)器人、滅火機(jī)器人等,推薦的步進(jìn)電機(jī)的參數(shù)如下:兩相四線(方便設(shè)計或選擇驅(qū)動器)、歩距角1.8°(控制精度高)、扭矩>3Kg·cm(載重大)、混合式(相對反應(yīng)式和永磁式步進(jìn)電機(jī),具有輸出力矩大、動態(tài)性能好,步距角小,但結(jié)構(gòu)復(fù)雜、成本相對較高)。
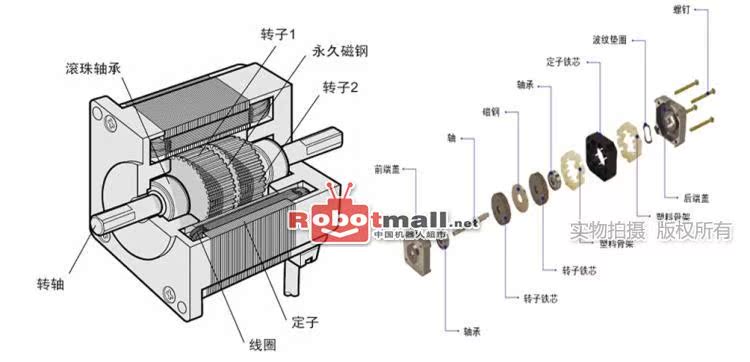
混合式步進(jìn)電機(jī)結(jié)構(gòu)圖
(從圖中我們可以看出步進(jìn)電機(jī)遠(yuǎn)比直流電機(jī)結(jié)構(gòu)復(fù)雜,所以成本也高的多)
可以說步進(jìn)電機(jī)的性能直接決定了“步進(jìn)電機(jī)智能車”的售價。對于售價太低的產(chǎn)品,用戶一定要弄清楚電機(jī)的參數(shù)和性能,否則將會給使用帶來很大的問題,甚至不能使用。
產(chǎn)品簡介:
這款高轉(zhuǎn)速的三輪車底盤(以后后續(xù)基于該底盤的產(chǎn)品)主要是為高轉(zhuǎn)速、高靈活度的應(yīng)用場合而設(shè)計的。
底盤由兩個1.8°步距角的42步進(jìn)電機(jī)提供動力,最快速度可以達(dá)到100cm/s(在11.1V工作電壓下)。此外步進(jìn)電機(jī)的最大優(yōu)點是,可以精確控制轉(zhuǎn)動的角度,精度在1.8°以上(具體看步進(jìn)電機(jī)驅(qū)動器的細(xì)分?jǐn)?shù),細(xì)分越高,精度越高)。這是直流電機(jī)不一樣的地方。
底盤是由兩個電機(jī)和一個萬向輪溝通的三點式結(jié)構(gòu),這樣就能保證小車在做轉(zhuǎn)彎或原地轉(zhuǎn)圈動作時,小車不會偏離賽道;
小車的車輪內(nèi)部輪轂采用高強(qiáng)度PVC塑料,在壓力下不易變形。外部輪胎采用的是仿汽車輪胎花紋的橡膠。橡膠輪胎內(nèi)部是橡膠墊,充實了車輪,提高了車輪的彈性。橡膠和輪轂連接緊密,沒有其他輪子的輪胎和輪轂之間的相對滑動現(xiàn)象。整個輪子具有大抓地力、高強(qiáng)度等特點。品質(zhì)絕非塑料輪胎所能比擬。在實際使用中,載重20Kg(4驅(qū)車),輪轂不變形;是機(jī)器人智能車制作的最佳選擇。

步進(jìn)電機(jī)固定架由鋁合金材料制成,堅固輕便。小車底盤材料使用的是厚度5mm的材料,更堅固。

固定板上面留有多種固定孔和過線孔,方便用戶固定控制板。
以上特性,使得這款車非常適合用于開發(fā):迷宮機(jī)器人、滅火機(jī)器人、尋跡機(jī)器人、足球機(jī)器人等產(chǎn)品。
PS.有關(guān)步進(jìn)電機(jī)的更多了解或問題,請看本頁底部的“常見問題”。
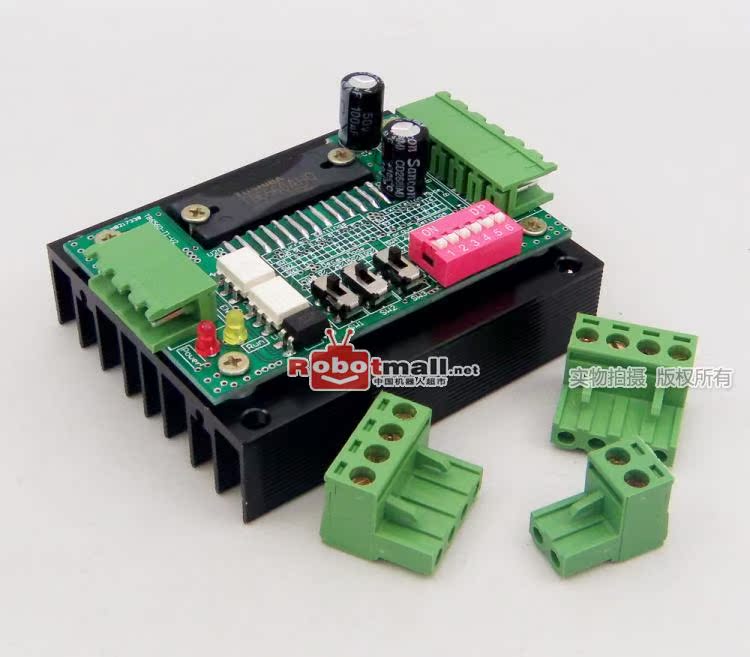
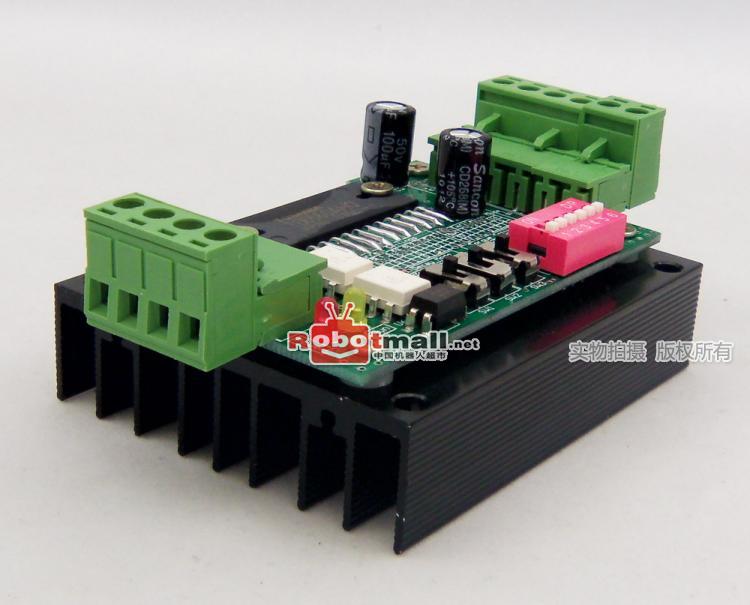
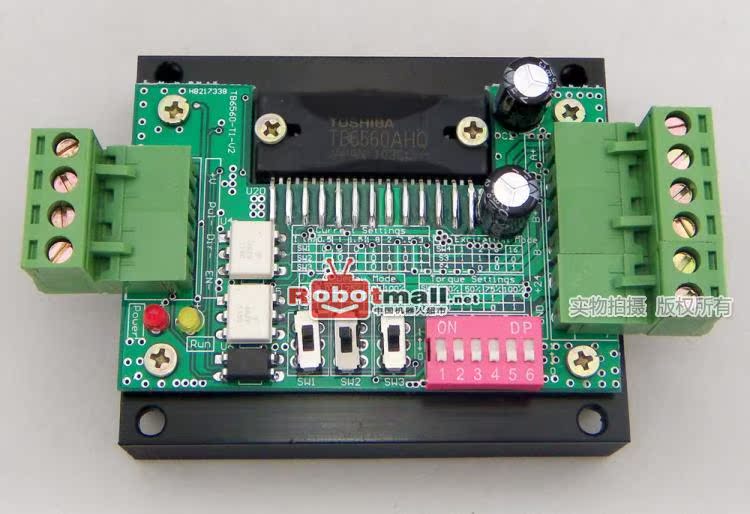
N-TB6560-T1步進(jìn)電機(jī)驅(qū)動器,是基于日本東芝TB6560芯片設(shè)計而成。具有可靠性高,適合工控領(lǐng)域;采用恒流斬波驅(qū)動技術(shù),電機(jī)工作電流恒定;輸入信號全部光耦隔離,提高步進(jìn)電機(jī)的EMC性能。
產(chǎn)品圖片:

TR3-SM步進(jìn)電機(jī)智能車底盤(1)

TR3-SM步進(jìn)電機(jī)智能車底盤(2)
規(guī)格參數(shù):
1、車體參數(shù):
車體直徑:17cm
車體高度:6.5cm
車體速度:≤100cm/s(12V空載狀態(tài)下)
車體載重:3Kg
2、步進(jìn)電機(jī)參數(shù):
3、步進(jìn)電機(jī)驅(qū)動器參數(shù):
1.直流12V-24V
2.最大電流:3.5A
3.電流可調(diào)(Current Settings):0.5A,1A,1.5A,1.8A,2A.2.5A,3.5A
4.細(xì)分可調(diào)(Excitation Mode):1,2,8,16
5.衰減可調(diào)(Decay Mode):。
-----通過對衰減模式的調(diào)節(jié)可以匹配不同的電機(jī)阻抗,從而消除步進(jìn)電機(jī)鎖定時的噪音以及電機(jī)運(yùn)動過程中的抖動。
自動半流設(shè)置(Torque Settings):
產(chǎn)品清單:
1、42步進(jìn)電機(jī) 2臺
2、42步進(jìn)電機(jī)固定件 4片
3、D5聯(lián)軸器 2個
4、橡膠車輪 2個
5、牛眼輪 1個
6、尼龍支撐柱 2個
7、40mm銅柱 2個
8、M3*5固定螺絲 8個
9、M3*12固定螺絲 22個
10、船型電源開關(guān) 1個
11、5mm后固定板 3塊
12、步進(jìn)電機(jī)驅(qū)動器 2塊
13、驅(qū)動器固定螺絲 若干
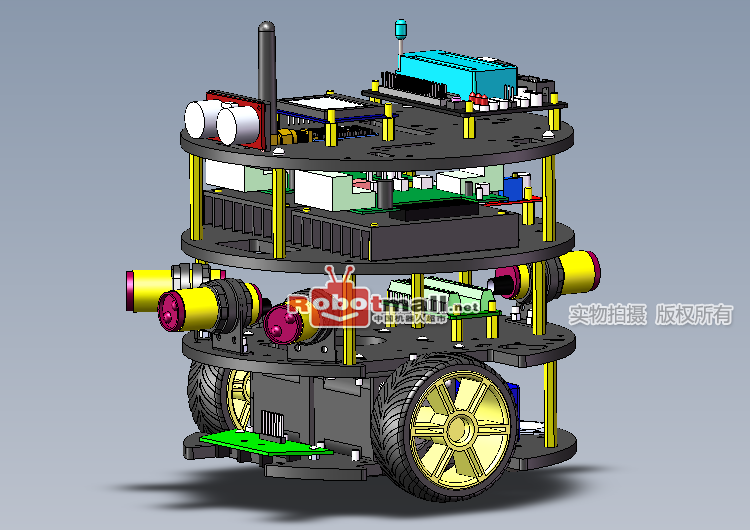
這是客戶利用同樣的底盤設(shè)計的智能機(jī)器人
常見問題:
1. 什么是步進(jìn)電機(jī)?
步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
2. 步進(jìn)電機(jī)類型及特點?
步進(jìn)電機(jī)分三種:永磁式(PM),反應(yīng)式(VR)和混合式(HB)
永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度或15度;
反應(yīng)式步進(jìn)一般為三相,可實現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度,但噪聲和振動都很大。在歐美等發(fā)達(dá)國家80年代已被淘汰。
混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點。它又分為兩相四相和五相:兩相步進(jìn)角一般為1.8度而五相步進(jìn)角一般為0.72度。這種步進(jìn)電機(jī)的應(yīng)用最為廣泛。
3. 什么是保持轉(zhuǎn)矩(HOLDING TORQUE)?
保持轉(zhuǎn)矩是指步進(jìn)電機(jī)通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機(jī)最重要的參數(shù)之一,通常步進(jìn)電機(jī)在低速時的力矩接近保持轉(zhuǎn)矩。保持轉(zhuǎn)矩越大則電機(jī)帶負(fù)載能力越強(qiáng)。由于步進(jìn)電機(jī)的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉(zhuǎn)矩就成為了衡量步進(jìn)電機(jī)重要的參數(shù)之一。比如,當(dāng)人們說2N.m的步進(jìn)電機(jī),在沒有特殊說明的情況下是指保持轉(zhuǎn)矩為2N.m的步進(jìn)電機(jī)。
4. 步進(jìn)電機(jī)精度為多少?是否累積?
一般步進(jìn)電機(jī)的精度為步進(jìn)角的3-5%。步進(jìn)電機(jī)單步的偏差并不會影響到下一步的精度因此步進(jìn)電機(jī)精度不累積。
5. 步進(jìn)電機(jī)為什么會發(fā)熱?
通常見到的各類電機(jī),內(nèi)部都是有鐵芯和繞組線圈的。繞組有電阻,通電會產(chǎn)生損耗,損耗大小與電阻和電流的平方成正比,這就是我們常說的銅損;如果電流不是標(biāo)準(zhǔn)的直流或正弦波,還會產(chǎn)生諧波損耗。鐵心有磁滯渦流效應(yīng),在交變磁場中也會產(chǎn)生損耗,其大小與材料,電流,頻率,電壓有關(guān),這叫鐵損。
銅損和鐵損都會以發(fā)熱的形式表現(xiàn)出來,從而影響電機(jī)的效率。步進(jìn)電機(jī)一般追求定位精度和力矩輸出,效率比較低,電流一般比較大,且諧波成分高,電流交變的頻率也隨轉(zhuǎn)速而變化,因而步進(jìn)電機(jī)普遍存在發(fā)熱情況,且情況比一般交流電機(jī)嚴(yán)重。
步進(jìn)電機(jī)溫度過高首先會使電機(jī)的磁性材料退磁,從而導(dǎo)致力矩下降甚至于丟失。因此電機(jī)外表允許的最高溫度應(yīng)取決于不同電機(jī)磁性材料的退磁點;一般來說,磁性材料的退磁點都在攝氏130度以上,因此步進(jìn)電機(jī)外表溫度在攝氏80-90度完全正常。
6. 為什么步進(jìn)電機(jī)的力矩會隨轉(zhuǎn)速升高而下降?
當(dāng)步進(jìn)電機(jī)轉(zhuǎn)動時,電機(jī)各相繞組的電感將形成一個反向電動勢;頻率越高,反向電動勢越大。在它的作用下,電機(jī)隨頻率(或速度)的增大而相電流減小,從而導(dǎo)致力矩下降。
7. 為什么步進(jìn)電機(jī)低速時可以正常運(yùn)轉(zhuǎn),但若高于一定速度就無法啟動,并伴有嘯叫聲?
步進(jìn)電機(jī)有一個技術(shù)參數(shù):空載啟動頻率,即步進(jìn)電機(jī)在空載情況下能夠正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機(jī)不能正常啟動,可能發(fā)生丟步或堵轉(zhuǎn)。在有負(fù)載的情況下,啟動頻率應(yīng)更低。如果要使電機(jī)達(dá)到高速轉(zhuǎn)動,脈沖頻率應(yīng)該有加速過程,即啟動頻率較低,然后按一定加速度升到所希望的高頻(電機(jī)轉(zhuǎn)速從低速升到高速)。我們建議空載啟動頻率選定為電機(jī)運(yùn)轉(zhuǎn)一圈所需脈沖數(shù)的2倍。
8. 如何克服兩相混合式步進(jìn)電機(jī)在低速運(yùn)轉(zhuǎn)時的振動和噪聲?
步進(jìn)電機(jī)低速轉(zhuǎn)動時振動和噪聲大是其固有的缺點,一般可采用以下方案來克服:
A、如步進(jìn)電機(jī)正好工作在共振區(qū),可通過改變減速比提高步進(jìn)電機(jī)運(yùn)行速度。
B、采用帶有細(xì)分功能的驅(qū)動器,這是最常用的,最簡便的方法。因為細(xì)分型驅(qū)動器電機(jī)的相電流變流較半步型平緩。
C、換成步距角更小的步進(jìn)電機(jī),如三相或五相步進(jìn)電機(jī),或兩相細(xì)分型步進(jìn)電機(jī)。
D、換成直流或交流伺服電機(jī),幾乎可以完全克服震動和噪聲,但成本較高。
E、在電機(jī)軸上加磁性阻尼器,市場上已有這種產(chǎn)品,但機(jī)械結(jié)構(gòu)改變較大。
9. 細(xì)分驅(qū)動器的細(xì)分?jǐn)?shù)是否能代表精度?
步進(jìn)電機(jī)的細(xì)分技術(shù)實質(zhì)上是一種電子阻尼技術(shù)(請參考有關(guān)文獻(xiàn)),其主要目的是減弱或消除步進(jìn)電機(jī)的低頻振動,提高電機(jī)的運(yùn)轉(zhuǎn)精度只是細(xì)分技術(shù)的一個附帶功能。比如對于步進(jìn)角為1.8度的兩相混合式步進(jìn)電機(jī),如果細(xì)分驅(qū)動器的細(xì)分?jǐn)?shù)設(shè)置為4,那么電機(jī)的運(yùn)轉(zhuǎn)分辨率為每個脈沖0.45度,電機(jī)的精度能否達(dá)到或接近0.45度,還取決于細(xì)分驅(qū)動器的細(xì)分電流控制精度等其它因素。不同廠家的細(xì)分驅(qū)動器精度可能差別很大;細(xì)分?jǐn)?shù)越大精度越難控制。
10. 步進(jìn)電機(jī)的靜態(tài)指標(biāo)術(shù)語:
(1)相數(shù):產(chǎn)生不同對N、S磁場的激磁線圈對數(shù)。常用m表示。
(2)拍數(shù):完成一個磁場周期性變化所需脈沖數(shù)或?qū)щ姞顟B(tài)用n表示,或指電機(jī)轉(zhuǎn)過一個齒距角所需脈沖數(shù),以四相電機(jī)為例,有四相四拍運(yùn)行方式即AB-BC-CD-DA-AB,四相八拍運(yùn)行方式即 A-AB-B-BC-C-CD-D-DA-A.
(3)步距角:對應(yīng)一個脈沖信號,電機(jī)轉(zhuǎn)子轉(zhuǎn)過的角位移用θ表示。θ=360度(轉(zhuǎn)子齒數(shù)*運(yùn)行拍數(shù)),以常規(guī)二、四相,轉(zhuǎn)子齒為50齒電機(jī)為例。四拍運(yùn)行時步距角為θ=360度/(50*4)=1.8度(俗稱整步),八拍運(yùn)行時步距角為θ=360度/(50*8)=0.9度(俗稱半步)。
(4)定位轉(zhuǎn)矩:電機(jī)在不通電狀態(tài)下,電機(jī)轉(zhuǎn)子自身的鎖定力矩(由磁場齒形的諧波以及機(jī)械誤差造成的)
(5)靜轉(zhuǎn)矩:電機(jī)在額定靜態(tài)電作用下,電機(jī)不作旋轉(zhuǎn)運(yùn)動時,電機(jī)轉(zhuǎn)軸的鎖定力矩。此力矩是衡量電機(jī)體積(幾何尺寸)的標(biāo)準(zhǔn),與驅(qū)動電壓及驅(qū)動電源等無關(guān)。
雖然靜轉(zhuǎn)矩與電磁激磁安匝數(shù)成正比,與定齒轉(zhuǎn)子間的氣隙有關(guān),但過份采用減小氣隙,增加激磁安匝來提高靜力矩是不可取的,這樣會造成電機(jī)的發(fā)熱及機(jī)械噪音。
11.步進(jìn)電機(jī)的動態(tài)指標(biāo)術(shù)語:
(1)步距角精度:
步進(jìn)電機(jī)每轉(zhuǎn)過一個步距角的實際值與理論值的誤差。用百分比表示:誤差/步距角*100%。不同運(yùn)行拍數(shù)其值不同,四拍運(yùn)行時應(yīng)在5%之內(nèi),八拍運(yùn)行時應(yīng)在15%以內(nèi)。
(2)失步:
電機(jī)運(yùn)轉(zhuǎn)時運(yùn)轉(zhuǎn)的步數(shù),不等于理論上的步數(shù)。稱之為失步
(3)失調(diào)角:
轉(zhuǎn)子齒軸線偏移定子齒軸線的角度,電機(jī)運(yùn)轉(zhuǎn)必存在失調(diào)角,由失調(diào)角產(chǎn)生的誤差,采用細(xì)分驅(qū)動是不能解決的。
(4)最大空載起動頻率:
電機(jī)在某種驅(qū)動形式、電壓及額定電流下,在不加負(fù)載的情況下,能夠直接起動的最大頻率。
(5)最大空載的運(yùn)行頻率:
電機(jī)在某種驅(qū)動形式,電壓及額定電流下,電機(jī)不帶負(fù)載的最高轉(zhuǎn)速頻率。
(6)運(yùn)行矩頻特性:
電機(jī)在某種測試條件下測得運(yùn)行中輸出力矩與頻率關(guān)系的曲線稱為運(yùn)行矩頻特性,這是電機(jī)諸多動態(tài)曲線中最重要的,也是電機(jī)選擇的根本依據(jù)。電機(jī)一旦選定,電機(jī)的靜力矩確定,而動態(tài)力矩卻不然,電機(jī)的動態(tài)力矩取決于電機(jī)運(yùn)行時的平均電流(而非靜態(tài)電流),平均電流越大,電機(jī)輸出力矩越大,即電機(jī)的頻率特性越硬。 要使平均電流大,盡可能提高驅(qū)動電壓,使采用小電感大電流的電機(jī)。
(7)電機(jī)的共振點:
步進(jìn)電機(jī)均有固定的共振區(qū)域,二、四相感應(yīng)子式步進(jìn)電機(jī)的共振區(qū)一般在180-250pps之間(步距角1.8度)或在400pps左右(步距角為0.9度),電機(jī)驅(qū)動電壓越高,電機(jī)電流越大,負(fù)載越輕,電機(jī)體積越小,則共振區(qū)向上偏移,反之亦然,為使電機(jī)輸出電矩大,不失步和整個系統(tǒng)的噪音降低,一般工作點均應(yīng)偏移共振區(qū)較多。
(8)電機(jī)正反轉(zhuǎn)控制:
當(dāng)電機(jī)繞組通電時序為A-AB-B-BC-C-CD-D-DA時為正轉(zhuǎn),通電時序為DA-D-CD-C-BC-B-AB-A時為反轉(zhuǎn)。

| 
| ||||||||||||||
| 買家 | 購買價 | 購買數(shù)量 | 購買時間 |
|---|---|---|---|
| xue*** | 298.000 | 6 | 2017-11-13 |
聯(lián)系我們 | 支付方式 | 售后服務(wù) | 網(wǎng)站地圖 | 幫助中心 | 隱私保護(hù)
| 地址:北京市順義區(qū)臨空經(jīng)濟(jì)核心區(qū)裕華路28號2號樓2層 客戶服務(wù)電話:010-62669059 郵箱:[email protected] | |
| Copyright ? 2004-2021 北京納克斯機(jī)器人技術(shù)有限公司. All rights reserved. 京ICP備2021012102號 | |
| (瀏覽本網(wǎng)主頁,建議將電腦顯示屏的分辨率調(diào)為1024*768) | |
| ( 備用域名:hnerio.com,www.nuxrobot.cn,www.nuxtech.cn) | |
|
|
|








