






|

四軸飛行型器,自平衡小車最佳傳感器方案,有的童鞋說,沒有磁場傳感器,沒有氣壓傳感器,能做四軸飛行器嗎?偏航軸不是會隨時間漂移嗎?我要告訴您的是,俯仰角和偏航角才是關(guān)鍵,磁場和氣壓就是雞肋,欲知詳情請看描述末尾的相關(guān)分析。
最新更新軟件,支持51/AVR/Arduino/STM8/STM32等各種單片機。
買家看點:4、模塊內(nèi)部自帶電壓穩(wěn)定電路,可以兼容3.3V/5V的嵌入式系統(tǒng),連接方便。
5、模塊保留了MPU6050的I2C接口,以滿足高級用戶希望訪問底層測量數(shù)據(jù)的需求。
6、采用先進的數(shù)字濾波技術(shù),能有效降低測量噪聲,提高測量精度。
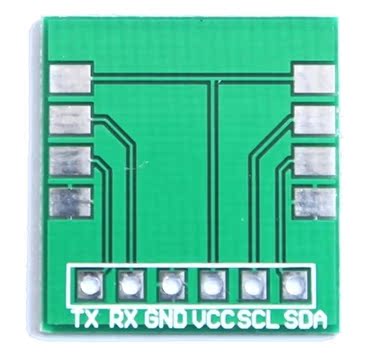
采用郵票孔鍍金工藝,品質(zhì)保證,可嵌入用戶的PCB板中。

體積不足一枚1毛硬幣大小,模塊厚度2mm,郵票孔設(shè)計可以方面地將模塊嵌入到用戶的電路板中。
產(chǎn)品參數(shù):
1、電壓:3V~6V
2、電流:<10mA
3、體積:15.24mm X 15.24mm X 2mm
4、焊盤間距:上下100mil(2.54mm),左右600mil(15.24mm)
5、測量維度:加速度:3維,角速度:3維,姿態(tài)角:3維
6、量程:加速度:±16g,角速度:±2000°/s。
7、分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。
8、穩(wěn)定性:加速度:0.001g,角速度0.02°/s。
9、姿態(tài)測量穩(wěn)定度:0.01°。
10、數(shù)據(jù)輸出頻率100Hz(波特率115200)/20Hz(波特率9600)。
11、數(shù)據(jù)接口:串口(TTL電平),I2C(直接連MPU6050,無姿態(tài)輸出)
10、波特率115200kps/9600kps。
11、提供單片機解析示例代碼。
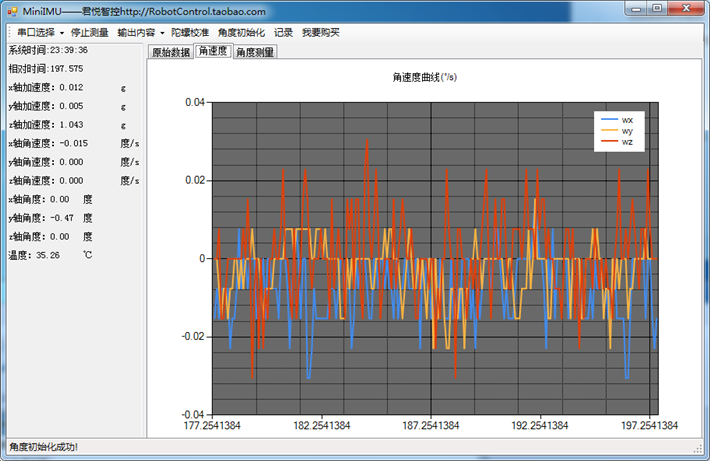
完善的上位機程序:
加速度測量曲線(靜止):

角速度測量曲線(靜止)
卡爾曼濾波后的角度輸出(靜止):

(注:滾轉(zhuǎn)角曲線為藍色,位于圖像最上端縱坐標為0.2的位置)
利用上位機記錄測量數(shù)據(jù):

連接方法:
USB串口模塊連接6050模塊的方法是:USB串口模塊的+5V,TXD,RXD,GND接6050模塊的VCC,RX,TX,GND。注意TXD和RXD的交叉。
和計算機的接口需要使用TTL電平的串口,建議搭配使用本店的兩款USB轉(zhuǎn)串口模塊之一,以免其他品牌的串口模塊兼容性問題導致6050模塊無法正常輸出數(shù)據(jù),耽誤您寶貴的時間:
(1)多功能USB轉(zhuǎn)串口模塊:

(2)USB轉(zhuǎn)TTL模塊

連MCU單片機

通常情況下,MCU的串口資源比較緊張,有的單片機只有一個串口,而且調(diào)試的時候需要通過串口輸出調(diào)試信息,這時可以將MCU的TX引腳連接到USB轉(zhuǎn)串口模塊的RX上,6050模塊的TX接到MCU的RX引腳上,這樣MCU既可以收到6050模塊的數(shù)據(jù),又可以輸出調(diào)試信息了。只是MCU無法輸出串口指令給6050模塊了,不過模塊的配置都是可以掉電保存的,而且校準可以再上電后第三秒鐘自動執(zhí)行,通常情況下不用發(fā)送任何指令即可工作。

如果需要在MCU接受6050模塊的輸出數(shù)據(jù)的同時,用上位機監(jiān)視當前的數(shù)據(jù),可以將USB轉(zhuǎn)串口模塊的RX接到模塊的TX引腳上,并共地即可。

圖片視頻:
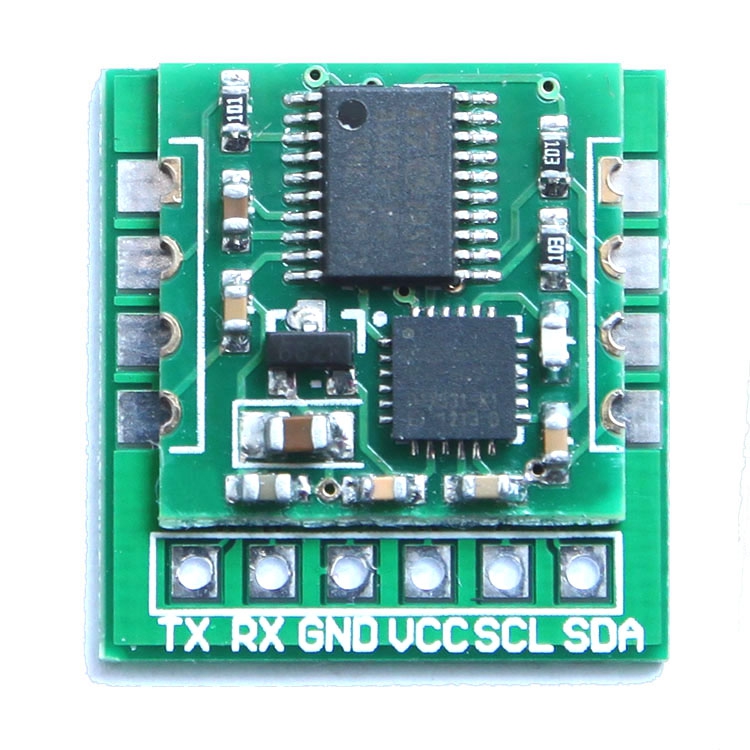
正面:

反面:

批量生產(chǎn),機焊工藝:


| 買家 | 購買價 | 購買數(shù)量 | 購買時間 |
|---|---|---|---|
| 陳*** | 58.000 | 2 | 2017-09-17 |
聯(lián)系我們 | 支付方式 | 售后服務(wù) | 網(wǎng)站地圖 | 幫助中心 | 隱私保護
| 地址:北京市順義區(qū)臨空經(jīng)濟核心區(qū)裕華路28號2號樓2層 客戶服務(wù)電話:010-62669059 郵箱:[email protected] | |
| Copyright ? 2004-2021 北京納克斯機器人技術(shù)有限公司. All rights reserved. 京ICP備2021012102號 | |
| (瀏覽本網(wǎng)主頁,建議將電腦顯示屏的分辨率調(diào)為1024*768) | |
| ( 備用域名:hnerio.com,www.nuxrobot.cn,www.nuxtech.cn) | |
|
|
|








