





| 創(chuàng)客天地 | Micro:bit及其他 | 機(jī)器人套件 | Arduino系列 | 電子積木 | 電子耗材 | 機(jī)械配件 | 教材|工具|其他 |
| 教學(xué)機(jī)器人 | 自動(dòng)控制區(qū) | 機(jī)器人底盤(pán) | 配套電子模組 | 機(jī)械配件 | 電子配件 | 實(shí)驗(yàn)室設(shè)備與工具 |
| 電子競(jìng)賽套件 | 電子制作套件 |
| 彩色液晶模組 | 單色液晶模組 |
| PCB制作 | 項(xiàng)目開(kāi)發(fā) |

|

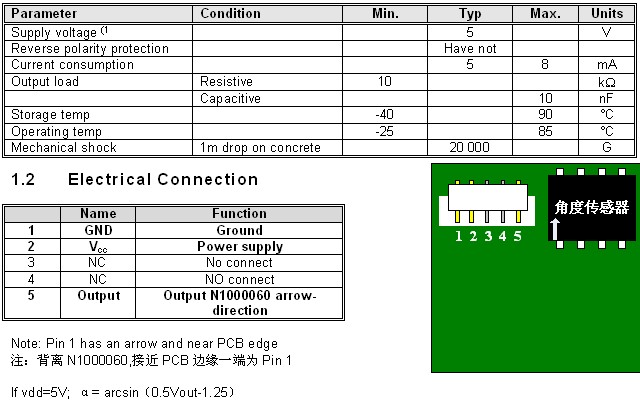
這是SCA60C的管腳圖。只用到了三個(gè)口:VCC,GND,OUTPUT,NC是空管腳
角度和輸出電壓的關(guān)系:α= arcsin(0.5Vout-1.25)
在小范圍內(nèi),可以認(rèn)為是線性變化。
1.描述:
SCA60C是由芬蘭VTI生產(chǎn)的基于3D-MEMS(三維微電子機(jī)械系統(tǒng))技術(shù)的,固態(tài)硅基電容式傾角傳感器。既可以測(cè)靜態(tài)的加速度如地球重力加速度,又可以測(cè)動(dòng)態(tài)的加速度如沖擊,振動(dòng)等。
和芬蘭VTI其他型號(hào)傾角傳感器相比,SCA60C又具有測(cè)量量程寬(±90°),價(jià)格低的優(yōu)點(diǎn),在教學(xué)設(shè)備、機(jī)器人、電子設(shè)計(jì)競(jìng)賽中有廣泛應(yīng)用。例如全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽中,2011年“基于自由擺的平板控制系統(tǒng)(B題)”、2007年“電動(dòng)車(chē)蹺蹺板(F,J題)”,SCA60C使用就非常多,取得了良好的效果。
PS.芬蘭VTI科技是全球范圍內(nèi)硅電容式慣性傳感器設(shè)計(jì)和生產(chǎn)的先驅(qū)。VTI的傾角傳感器以其出色的性能:如高精度、線性度、穩(wěn)定性、重復(fù)性、可靠性、溫度特性、抗振性(高達(dá)20000g)等,已廣泛運(yùn)用于各個(gè)領(lǐng)域。

傾角傳感器原理:傾角測(cè)量理論是牛頓第二定律,根據(jù)基本的物理原理,在一個(gè)系統(tǒng)內(nèi)部,速度是無(wú)法測(cè)量的,但卻可以測(cè)量其加速度。如果初速度已知,就可以通過(guò)積分計(jì)算出線速度,進(jìn)而可以計(jì)算出直線位移。所以它其實(shí)是運(yùn)用慣性原理的一種加速度傳感器。
當(dāng)傾角傳感器靜止時(shí)也就是側(cè)面和垂直方向沒(méi)有加速度作用,那么作用在它上面的只有重力加速度。重力垂直軸與加速度傳感器靈敏軸之間的夾角就是傾斜角了。 計(jì)算方式是加速度傳感器輸出信號(hào)經(jīng)高精度模數(shù)轉(zhuǎn)換后,交由混合信號(hào)處理器進(jìn)行濾波、平滑、方差估計(jì)等處理后,獲得精確的瞬時(shí)加速度。最終將精確瞬時(shí)加速度解算為傾角信息。

傾角傳感器結(jié)構(gòu):傾角傳感器把MCU,MEMS加速度計(jì),模數(shù)轉(zhuǎn)換電路,通訊單元全都集成在一塊非常小的電路板上面。直接輸出角度等傾斜數(shù)據(jù)。
?
2、規(guī)格:
品牌:VTI
單軸傾角傳感器
測(cè)量范圍1g(±90度)
單極5V供電,比例電壓輸出
模擬0.5-4.5V輸出
工作溫度范圍寬
尺寸:2.5cm*2.5cm
3、應(yīng)用:
平臺(tái)水準(zhǔn)測(cè)量與穩(wěn)定
水準(zhǔn)儀器
旋轉(zhuǎn)激光儀
施工水準(zhǔn)設(shè)備
工程車(chē)輛調(diào)平,和高空平臺(tái)安全保護(hù)
定向衛(wèi)星通訊天線的俯仰角測(cè)量
船舶航行姿態(tài)測(cè)量
盾構(gòu)頂管應(yīng)用
大壩檢測(cè)
地質(zhì)設(shè)備傾斜監(jiān)測(cè)
火炮炮管初射角度測(cè)量
雷達(dá)車(chē)輛平臺(tái)檢測(cè)
衛(wèi)星通訊車(chē)姿態(tài)檢測(cè)
太陽(yáng)能基座傾角檢測(cè)
4、優(yōu)勢(shì):
抗沖擊能力強(qiáng),能耗低
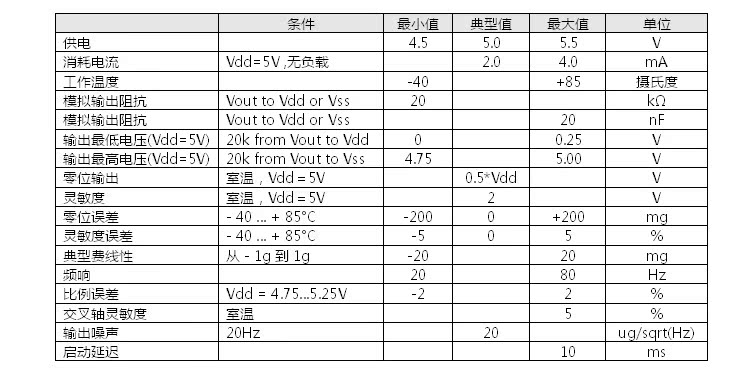
5、電氣特性:
注:1. 要達(dá)到高精度,電源電壓變化最好在5±0.05V。
2. 測(cè)量范圍受到靈敏度,零點(diǎn)偏移,和供電電壓變化的影響。
3. 測(cè)量方向參考器件上的箭頭指向。
4. 其他方向要注意事項(xiàng)請(qǐng)聯(lián)系工程師。
6、圖片Pictures:

由于SCA60C模組測(cè)量的量程非常寬(大部分的傾角測(cè)量量程在±15°,±30°,而SCA60C的量程為:±90°),所以輸出信號(hào)和輸出角度就不再是線性關(guān)系。
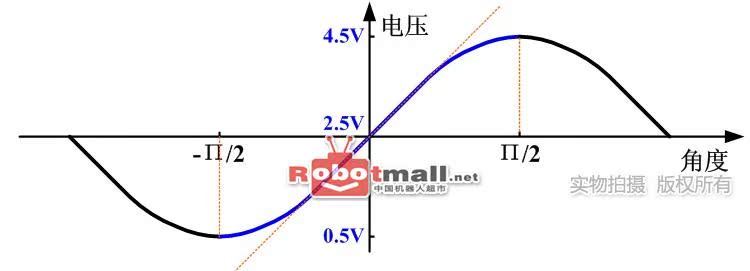
角度和輸出電壓的關(guān)系為:α= arcsin(0.5Vout-1.25)
備注:從圖形曲線看出,當(dāng)角度變化不大的時(shí)候,例如±15°,輸出電壓和角度還是呈比例關(guān)系的。
8、常見(jiàn)問(wèn)題:
1. 測(cè)量精度不高,達(dá)不到標(biāo)稱(chēng)值?
答:這是寬量程(±90°)的傾角傳感器。按照0.5-4.5V信號(hào)輸出粗略估算,1°對(duì)應(yīng)的模擬電壓值約為:(4.5-0.5)/180=22.22mv。對(duì)于一個(gè)8bit的ADC,最小精度約為:19.53mv,大約為0.88°;對(duì)于10bit的ADC,最小精度約為:4.88mv,大約為0.22°;對(duì)于12bit的ADC,最小精度約為:1.22mv,大約為0.055°。從以上結(jié)果不難看出,使用10bit的ADC,可以測(cè)量最小為0.22°的傾角。而使用8bit的ADC只能檢測(cè)到最小0.88°的傾角。這就是為什么達(dá)不到傳感器標(biāo)定值的原因。
2. 傳感器信號(hào)輸出不穩(wěn)定?
答:原因大概有兩種:(1)電源不穩(wěn)定。最佳的電源波動(dòng)為5±0.05V,大于這個(gè)范圍的電源都會(huì)引入電噪聲,導(dǎo)致信號(hào)輸出不穩(wěn)定;(2)傳感器應(yīng)用場(chǎng)所比較顛簸,超過(guò)了傳感器的響應(yīng)速度。
3. 在實(shí)際測(cè)量過(guò)程中,量程達(dá)不到±90°?
答:測(cè)量范圍受到靈敏度,零點(diǎn)偏移,和供電電壓變化的影響,和標(biāo)稱(chēng)值會(huì)有偏差。
4. 傾斜模組,信號(hào)沒(méi)有變化,或變化不大?
答:請(qǐng)按照傳感器芯片上面標(biāo)注的箭頭方向進(jìn)行傾斜。垂直箭頭方向的傾斜,不會(huì)造成信號(hào)正確輸出。
9、資源:
|
| 大小:186KB | 上傳日期:2011.04.24 |

| |||||||||
| 買(mǎi)家 | 購(gòu)買(mǎi)價(jià) | 購(gòu)買(mǎi)數(shù)量 | 購(gòu)買(mǎi)時(shí)間 |
|---|---|---|---|
| zha*** | 75.000 | 1 | 2017-09-14 |
| 398*** | 75.000 | 3 | 2015-10-19 |
| sdk*** | 75.000 | 4 | 2014-07-22 |
| bua*** | 75.000 | 2 | 2011-12-05 |
聯(lián)系我們 | 支付方式 | 售后服務(wù) | 網(wǎng)站地圖 | 幫助中心 | 隱私保護(hù)
| 地址:北京市順義區(qū)臨空經(jīng)濟(jì)核心區(qū)裕華路28號(hào)2號(hào)樓2層 客戶服務(wù)電話:010-62669059 郵箱:[email protected] | |
| Copyright ? 2004-2021 北京納克斯機(jī)器人技術(shù)有限公司. All rights reserved. 京ICP備2021012102號(hào) | |
| (瀏覽本網(wǎng)主頁(yè),建議將電腦顯示屏的分辨率調(diào)為1024*768) | |
| ( 備用域名:hnerio.com,www.nuxrobot.cn,www.nuxtech.cn) | |
|
|
|








